2024欢迎访问##济宁NZJ-1001-7%-50Kvar智能抗谐波电容器厂家
湖南盈能电力科技有限公司,专业仪器仪表及自动化控制设备等。电力电子元器件、高低压电器、电力金具、电线电缆技术研发;防雷装置检测;仪器仪表,研发;消防设备及器材、通讯终端设备;通用仪器仪表、电力电子元器件、高低压电器、电力金具、建筑材料、水暖器材、压力管道及配件、工业自动化设备销;自营和各类商品及技术的进出口。
的产品、的服务、的信誉,承蒙广大客户多年来对我公司的关注、支持和参与,才铸就了湖南盈能电力科技有限公司在电力、石油、化工、铁道、冶金、公用事业等诸多领域取得的辉煌业绩,希望在今后一如既往地得到贵单位的鼎力支持,共同创更加辉煌的明天!
传统AOI依靠对像素网格值进行分析来确认线路板上元件的位置,这种方法又称为灰度相关法,它将元件灰度模型或参考图与板上实际元件相比较,一旦选准要搜索的模型,图像系统就通过计算像素数目找寻一个与之匹配的元件,如果找到了,元件的位置也就知道了。由于系统不断会检测到一些新元件,因此为适应这些新的元件形状参考图形可能经常发生变化。当元件相对参考模型旋转了一个角度或者大小不太一致时,像素网格分析方法就会出问题。
瞬态响应是电源在负载的巨大变化中恢复正常的速度。,对于E36312A来说,当电流从50%变到 时,其恢复到15mV的瞬态响应时间是50us。通道1的电流是5A,50%就是2.5A。“直流电流瞬态响应:瞬态响应是什么?如何测量?为什么它如此重要?”图3:上方显示的是电流从50%升至 ,然后又返回50%所发生的电流曲线变化。响应电压如下方所示,其中包括小的瞬态变化。图4:图中的输出电压显示了较小的电压瞬态变化。
作为一种线性传感器,位移传感器主要用来测量线性位置上的机械位移,在盾构机推进系统的每组油缸,都配备有位移传感器,用于测量油缸推进时的位移数据。盾构机推进系统油缸的分组通常如下图所示分区,顶部(A组)、右部(B组)、底部(C组)、左部(D组)。其中每组油缸都单独有位移传感器。在推进时,推进油缸伸出,撑靴作用到管片上盾构机前进的反力。油缸的压力可以独立调节,通过查看位移传感器监测到的每组油缸的推进数据,施工人员在控制室内可以实时监控每组油缸的行程和压力。
我们可以对台式电源电压和恒流限制来进行配置。电源将会监测电压和电流情况。对于测量结果随时间的变化,我们可以手动收集,也可以用计算机来收集。简单的程序或应用软件(如BenchVue)可以帮助检索电源,以便搜集数据并绘制图形。某些新款台式电源配有图形用户界面,还可直接使用USB存储器进行记录。图2中的示例是超级电容器在未达到2.7V的电压极限之前,以5A的速率进行充电的情况。图2:E36312A正在捕获一个100F超级电容器的充电情况当电容器达到2.7V以后,吸收的电流将会越来越少。
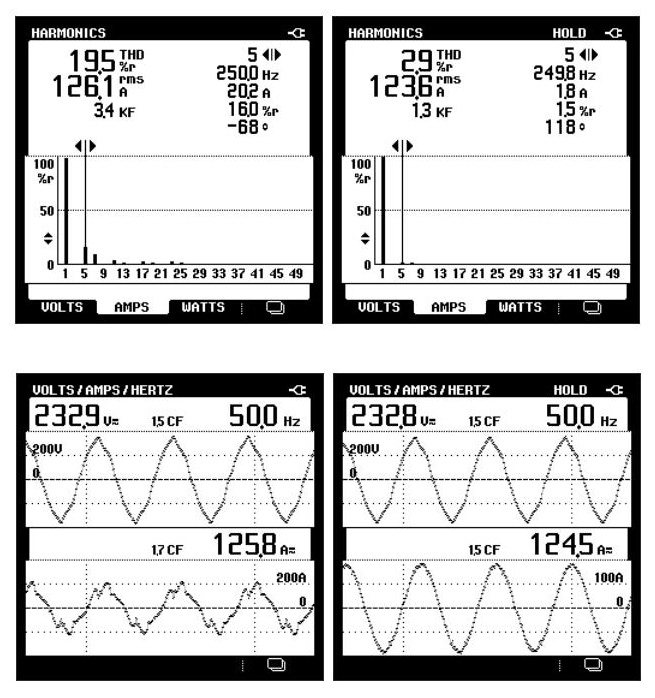
我司柔性线圈电流传感器系列(带积分器),即RogowskiCoil(洛氏线圈)电流传感器,采用先进的罗氏线圈技术,是一个在非铁磁性材料上均匀缠绕的环形线圈,无磁滞效应,几乎为零的相位误差,无磁饱和现象,线性度极高。柔性线圈是电流对时间的微分,积分器通过对输出电压信号进行积分(~1V),真实还原被测电流,输出完整的信号波形,其测量电流范围可从1安培到几万安。主要用于电流、高次谐波电流(可达4次)、复杂波形电流、瞬态冲击电流、相位、电能、功率、功率因数等检测;配带积分器后可更便捷地集成到其他测试设备,如电能质量分析仪、谐波分析仪、电力参数 、相位检测分析仪、工业控制装置、示波器、高精度数字多用表、瞬态冲击 、分布式测量系统、保护系统等。
稳定性指标在厂家仪器说明中没有,用户只能凭对于仪器结构的判断和参观或询问其他长时间使用过的用户来判断。扫描速度扫描速度快可提高数据准确性,重复性和稳定性。不同厂家的仪器扫描速度不同,从1次/秒到1000次/秒。一般来讲,循环扫描测试次数越多,平均结果的准确性越好,故速度越高越好;式干法和喷雾更要求速度越高越好;自由降落式干法虽然速度不快,但由于粒子只通过样品区一次,速度也是快一些好。用户每天需要的样品量,也是考虑速度的因素。
智能传感器的使用提高了机器人的机动性、适应性和智能化水平。人类的感受系统对感知外部世界信息是极其巧妙的,然而对于一些特殊的信息,传感器比人类的感受系统更有效。控制与驱动部分控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。驱动系统是向机械结构系统动力的装置。